
实时控制的伺服系统如何实现高精度与快速响应的动态平衡?
 摘要:
什么是实时控制的伺服系统?我们拆解这个概念:伺服系统:这是一个闭环控制系统,其核心目标是精确地控制一个物体的位置、速度或加速度,它由一个控制器、一个驱动器、一个执行机构(通常是电机...
摘要:
什么是实时控制的伺服系统?我们拆解这个概念:伺服系统:这是一个闭环控制系统,其核心目标是精确地控制一个物体的位置、速度或加速度,它由一个控制器、一个驱动器、一个执行机构(通常是电机... 什么是实时控制的伺服系统?
我们拆解这个概念:
-
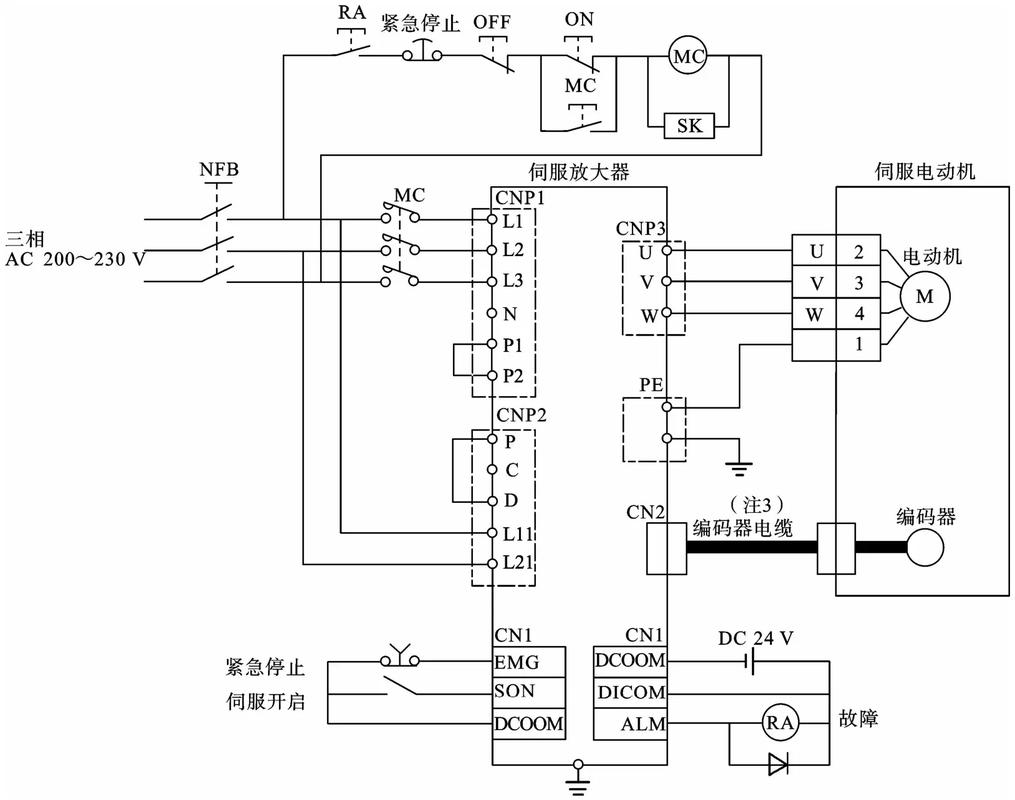
伺服系统:这是一个闭环控制系统,其核心目标是精确地控制一个物体的位置、速度或加速度,它由一个控制器、一个驱动器、一个执行机构(通常是电机)和一个反馈装置(如编码器)组成,系统通过不断比较“目标指令”和“实际反馈”来调整输出,以消除误差。
 (图片来源网络,侵删)
(图片来源网络,侵删) -
实时控制:这是伺服系统的灵魂,它意味着系统的控制指令必须在严格规定的时间间隔内被处理和执行,并且对外部事件(如位置指令的变化)必须在可预测的、极短的时间内做出响应,如果错过了这个“截止时间”,控制性能就会下降,甚至导致系统不稳定。
简单比喻: 想象一下你用鼠标在屏幕上画一条直线,你的大脑(控制器)发出“向右移动”的指令,你的手(执行机构/电机)和眼睛(反馈装置/编码器)协同工作,不断调整手的移动,使其精确地跟随鼠标光标,这个过程就是实时的,如果你的大脑反应延迟了0.5秒,你的手就会画得歪歪扭扭。
实时伺服系统的核心组成部分
一个典型的实时伺服系统包括以下四个关键部分:
-
控制器
 (图片来源网络,侵删)
(图片来源网络,侵删)- 作用:系统的大脑,它接收来自上位机(如PLC、PC或运动控制器)的位置/速度指令,并与编码器等反馈装置的实际位置/速度进行比较。
- 核心算法:执行控制算法,最经典的是PID控制(比例-积分-微分),更高级的系统会使用前馈控制、自适应控制、模糊控制等。
- 实时性体现:控制器必须在每个采样周期内完成上述所有计算,这个周期通常是毫秒甚至微秒级别。
-
驱动器
- 作用:系统的肌肉,它接收来自控制器的指令信号(通常是模拟量或数字总线信号),并将其转换成能够驱动电机的大功率电流或电压。
- 功能:提供电机的相电流,实现精确的力矩控制,现代伺服驱动器通常集成了复杂的控制算法,可以实现更高性能的控制。
-
执行机构
- 作用:系统的手和脚,通常是伺服电机,它将电能转化为精确的机械运动(旋转或直线)。
- 类型:
- 交流伺服电机:主流选择,分为永磁同步电机和无刷直流电机,效率高、响应快。
- 直流伺服电机:正在被交流伺服取代,但在一些低成本场合仍有应用。
- 直线电机:直接产生直线运动,无需丝杠等转换机构,精度和速度极高。
-
反馈装置
- 作用:系统的眼睛和耳朵,它实时检测电机的实际位置、速度等信息,并将其反馈给控制器,形成闭环。
- 核心元件:编码器。
- 增量式编码器:提供相对位置变化,需要“找零点”。
- 绝对值编码器:一上电就能提供电机的绝对位置,无需回零,精度更高,成本也更高。
实时性的关键指标与挑战
实时性不是“快”那么简单,它有几个关键指标:
- 采样周期:控制器执行一次控制循环所需的时间,周期越短,控制频率越高,系统响应越快,跟踪精度越高,高性能伺服系统可达 100kHz (10μs) 的控制频率。
- 延迟:从指令发出到系统开始响应的时间,延迟越小,系统的动态性能越好,整个回路的延迟包括:控制器计算延迟、驱动器处理延迟、电机机械响应延迟等。
- 抖动:采样周期的波动,如果周期忽长忽短,会导致控制输出不稳定,产生振动和噪音。高精度、低抖动的实时时钟是保证伺服系统稳定运行的基础。
挑战:
- 计算能力:复杂的控制算法需要强大的处理器。
- I/O延迟:传感器信号采集和指令输出的延迟必须被精确控制。
- 实时操作系统:普通操作系统(如Windows)的调度是不可预测的,无法满足实时性要求,必须使用实时操作系统,如VxWorks, QNX, Linux with PREEMPT_RT patch, 或专用运动控制器/PLC的OS。
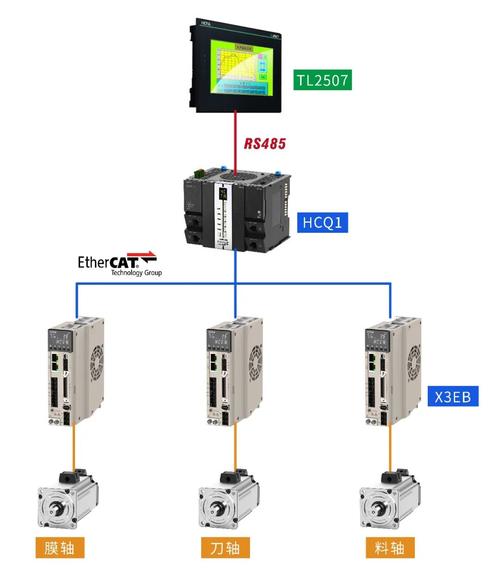
- 网络通信:在分布式系统中,使用EtherCAT, PROFINET等实时工业以太网协议,确保指令和反馈数据在确定的时间内传输。
实时伺服系统的应用领域
实时伺服系统是现代高端制造业和自动化领域的基石,无处不在:
- 工业机器人:6轴或多轴机器人的每一个关节都需要高精度、高动态的伺服控制,以实现复杂、流畅的轨迹。
- 数控机床:控制X, Y, Z轴以及旋转轴,实现刀具对工件的精确切削,直接决定了加工件的表面质量和尺寸精度。
- 半导体制造设备:光刻机、晶圆搬运臂等设备要求纳米级的定位精度和极高的运动平稳性,是伺服技术的“珠穆朗玛峰”。
- 自动化产线:如高速拾放机、贴片机、包装机械等,需要在极短时间内完成高速、高精度的定位和抓取。
- 航空航天:飞机的舵面控制、卫星的姿态控制、无人机的飞行控制等。
- 医疗设备:CT扫描仪的床板运动、手术机器人的精准操作。
- 测试与测量:振动台、运动模拟平台,用于模拟各种环境和工况。
发展趋势
实时伺服技术仍在不断演进,主要趋势包括:
-
更高性能:
- 更高精度:通过更高分辨率的编码器和更先进的控制算法,实现亚微米甚至纳米级定位。
- 更高速度和加速度:优化电机设计和驱动器性能,实现更快动态响应。
- 更低振动:通过高级算法(如陷波滤波器、自适应振动抑制)来抑制机械谐振。
-
智能化与集成化:
- 智能伺服:将AI和机器学习算法融入伺服系统,实现自整定、故障预测、参数自适应等功能。
- 一体化驱动:将驱动器、控制器甚至电机集成在一个紧凑的单元中,节省空间,简化布线。
-
网络化与总线化:
- EtherCAT等实时总线成为主流,取代传统的脉冲控制方式,实现多轴同步、更复杂的协调运动,并简化系统布线。
-
软件定义:
控制逻辑越来越多地通过软件实现,用户可以通过软件配置来实现不同的控制模式,使系统更加灵活。
实时控制的伺服系统是一个集机械、电子、控制理论和计算机技术于一体的复杂系统,它的核心在于“在确定的时间内,以极高的精度和响应速度,实现对物理世界的精确控制”,它不仅仅是“让电机转起来”,而是“让电机在正确的时间,转到正确的位置,并且运动过程平稳、快速、无超调”,从工厂的机器人到天上的卫星,实时伺服系统都是现代科技不可或缺的“肌肉”和“神经”。
作者:咔咔本文地址:https://jits.cn/content/27402.html发布于 02-22
文章转载或复制请以超链接形式并注明出处杰思科技・AI 股讯
还没有评论,来说两句吧...